
Manuel Caballero
Plain Concepts Research
En nuestro artículo anterior sobre la plataforma MRLink, presentamos nuestro enfoque innovador para la teleoperación de robots en realidad virtual. Esta solución abrió la puerta a un control intuitivo, inmersivo y preciso de robots remotos, permitiendo a los usuarios interactuar con su entorno como si estuvieran físicamente presentes.
Desde ese hito, hemos seguido mejorando la plataforma, centrándonos en nuevas entradas sensoriales y en optimizar la conciencia situacional de los operadores. Hoy compartimos algunas de las novedades diseñadas para ofrecer más datos, mejor contexto y una experiencia de teleoperación más natural.
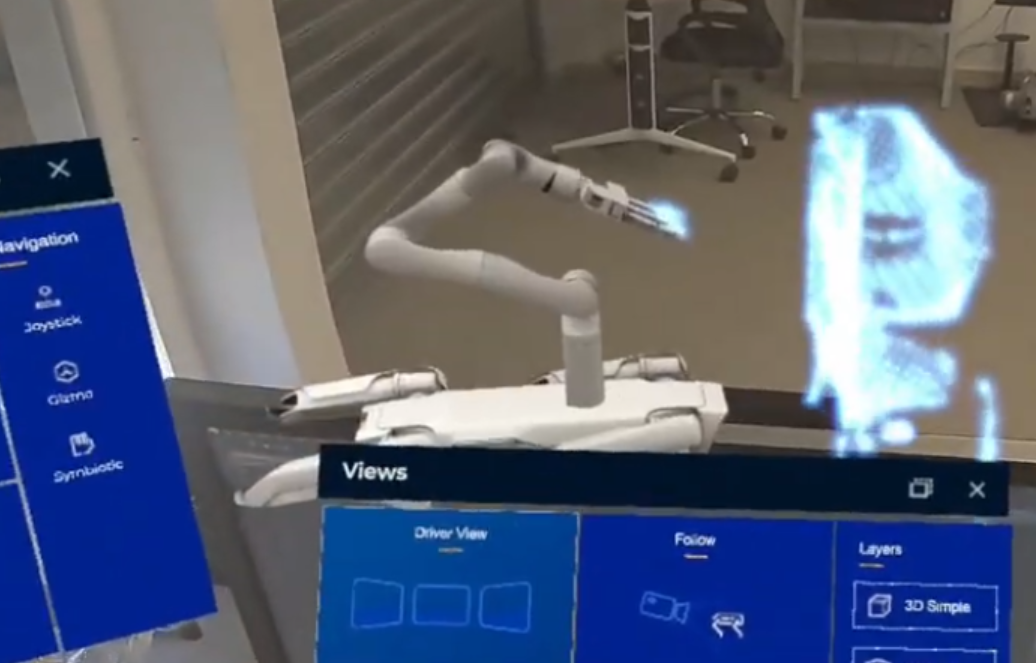
Una de las mejoras más importantes del sistema es la integración de Azure Kinect. Este dispositivo actúa como cámara remota y sensor de profundidad, permitiendo capturar nubes de puntos en tiempo real.
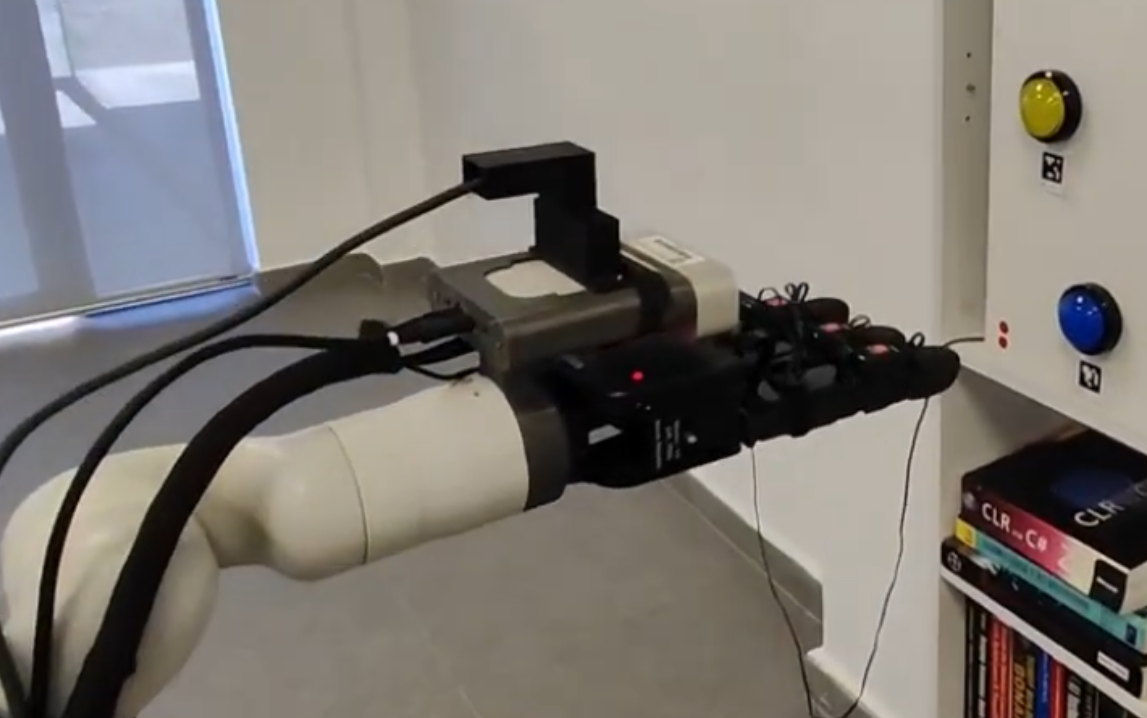
Al visualizar estos datos directamente dentro de la aplicación de realidad virtual, los operadores pueden comprender la disposición espacial del entorno remoto con una claridad sin precedentes. Esto mejora la percepción de profundidad, la navegación y la precisión en tareas de manipulación, especialmente en entornos complejos o congestionados.
Más allá de la navegación, la detección de profundidad abre un amplio abanico de aplicaciones en el mantenimiento industrial:
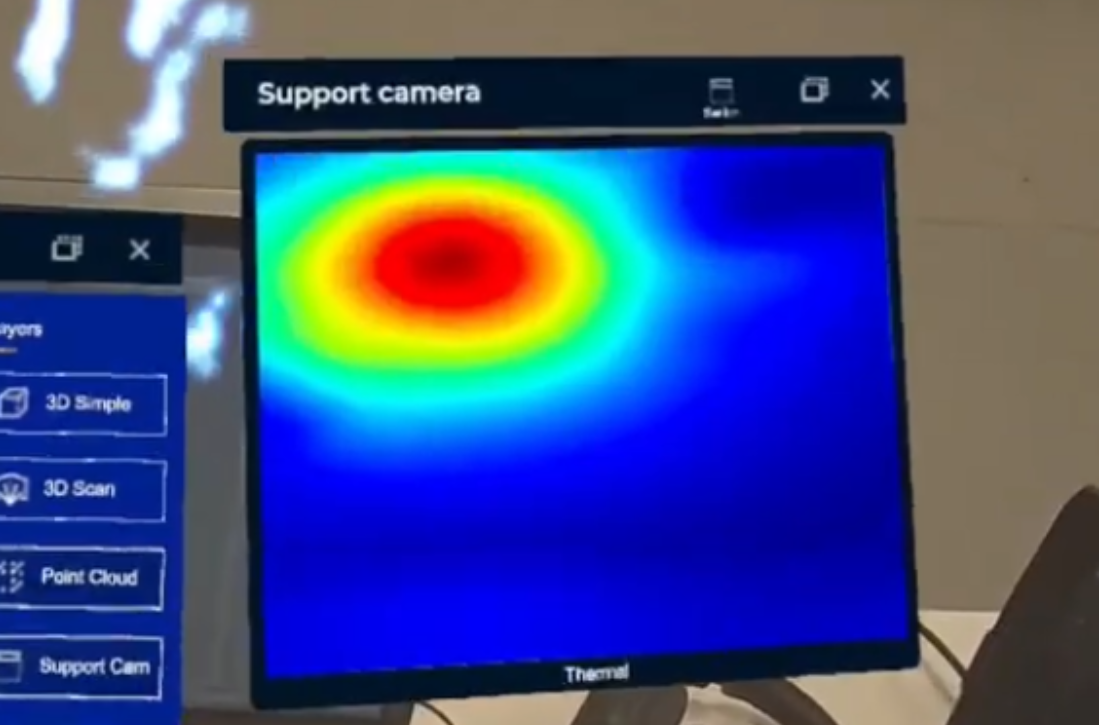
Otra incorporación clave es la cámara térmica, que permite detectar anomalías de temperatura en los equipos, ofreciendo a los operadores información crítica antes incluso de interactuar físicamente con la maquinaria.
Por ejemplo, identificar componentes sobrecalentados ayuda a priorizar reparaciones, evaluar riesgos y planificar intervenciones de manera más eficiente. Esta capa de retroalimentación térmica mejora la toma de decisiones y la seguridad durante operaciones remotas.
Entre las aplicaciones prácticas de los datos térmicos destacan:
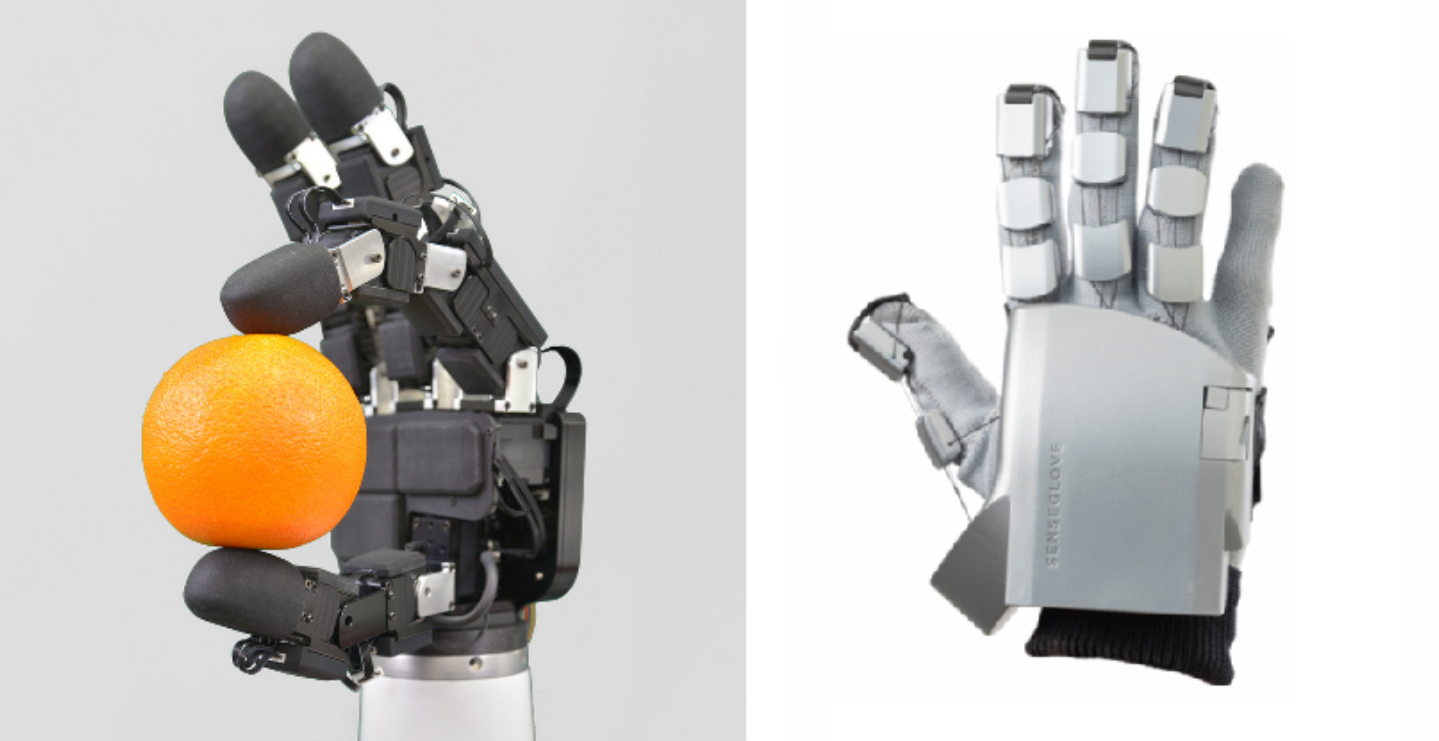
Aunque la visualización de datos es esencial, el tacto sigue siendo clave en la interacción humana con el entorno. Por ello, el siguiente paso es integrar los sensores táctiles de XELA Robotics y los guantes hápticos SenseGlove Nova 1.
Esta combinación permitirá a los operadores sentir las interacciones con objetos remotos, como agarrar una herramienta, presionar una superficie o manipular componentes delicados. La retroalimentación táctil acerca aún más la experiencia física y virtual, haciendo la teleoperación más natural y precisa.
Entre sus aplicaciones más relevantes:
El principal caso de uso que estamos desarrollando con esta tecnología es la teleoperación en instalaciones de aceleradores de partículas, dedicadas a la investigación en tecnología de fusión. Estos entornos operan con sistemas complejos, delicados y potencialmente peligrosos, donde el acceso humano directo está restringido o requiere estrictos protocolos de seguridad.
Gracias a la combinación de robots controlados a distancia, detección de profundidad, imagen térmica y retroalimentación táctil, los operadores pueden realizar inspecciones y tareas de mantenimiento dentro de zonas restringidas sin interrumpir experimentos críticos ni exponerse a radiación, campos magnéticos intensos, temperaturas extremas o ruido peligroso.
Esta integración de sensores avanzados con teleoperación representa un cambio fundamental en estos entornos, donde la seguridad, la precisión y la disponibilidad operativa son esenciales. Transforma el mantenimiento en un proceso controlado, rico en datos y proactivo, acelerando tanto la investigación como el desarrollo tecnológico.
La evolución de MRLink sigue empujando los límites de la teleoperación inmersiva. Con la integración de sensores de profundidad, imagen térmica y retroalimentación táctil, los operadores obtienen una comprensión más completa de los entornos remotos.
Estas mejoras hacen que la robótica remota sea más capaz, segura y centrada en las personas. En Plain Concepts seguimos innovando para expandir las posibilidades de la teleoperación en industrias que dependen de operaciones inteligentes, eficientes y seguras.
Este trabajo se ha desarrollado en el marco del proyecto NEURON-DONES (INVESTIGACIÓN INDUSTRIAL EN TECNOLOGÍAS CRÍTICAS PARA LA OPERACIÓN Y MANTENIMIENTO DE GRANDES INSTALACIONES CIENTÍFICAS APLICADAS A IFMIF-DONES PARA AVANZAR EN EL CAMINO DE LA FUSIÓN)
El proyecto NEURON-DONES, con número de expediente MIG-20221067, ha sido subvencionado por el CDTI – Centro de Desarrollo Tecnológico y la Innovación – a través de la convocatoria del Programa ‘Misiones CDTI’ del año 2022 y por la Unión Europea – NextGenerationEU -Mecanismo de recuperación, transformación y resiliencia.

Manuel Caballero
Plain Concepts Research